WAGO Stepper Controller 70 V / 7.5 A 6IN, 2OUT Benutzerhandbuch
- Typ
- Benutzerhandbuch


ii • Allgemeines
WAGO-I/O-SYSTEM 750
Busklemmen
Copyright 2014 by WAGO Kontakttechnik GmbH & Co. KG
Alle Rechte vorbehalten.
WAGO Kontakttechnik GmbH & Co. KG
Hansastraße 27
D-32423 Minden
Tel.: +49 (0) 571/8 87 – 0
Fax: +49 (0) 571/8 87 – 1 69
E-Mail: [email protected]
Web: http://www.wago.com
Technischer Support
Tel.: +49 (0) 571/8 87 – 5 55
Fax:
+49 (0) 571/8 87 – 85 55
E-Mail: [email protected]
Es wurden alle erdenklichen Maßnahmen getroffen, um die Richtigkeit und
Vollständigkeit der vorliegenden Dokumentation zu gewährleisten. Da sich
Fehler, trotz aller Sorgfalt, nie vollständig vermeiden lassen, sind wir für
Hinweise und Anregungen jederzeit dankbar.
E-Mail: [email protected]
Wir weisen darauf hin, dass die im Handbuch verwendeten Soft- und Hard-
warebezeichnungen und Markennamen der jeweiligen Firmen im Allgemeinen
einem Warenzeichenschutz, Markenzeichenschutz oder patentrechtlichem
Schutz unterliegen.

Inhaltsverzeichnis • 3
WAGO-I/O-SYSTEM 750
Busklemmen
Inhaltsverzeichnis
1 Wichtige Erläuterungen.............................................................................9
1.1 Rechtliche Grundlagen.............................................................................9
1.1.1 Urheberschutz......................................................................................9
1.1.2 Personalqualifikation........................................................................... 9
1.1.3 Bestimm
ungsgemäße Verwendung der Serie 750.............................10
1.1.4 Technischer Zustand der Geräte........................................................10
1.2
Normen und Richtlinien zum Betrieb der Serie 750..............................11
1.3 Symbole..................................................................................................12
1.4 Sicherheitshinweise................................................................................13
1.5 Schriftkonventionen ............................................................................... 14
1.6 Darstellungen der Zahlensysteme ..........................................................14
1.7 Gültigkeitsbereich ..................................................................................14
2 Busklemmen
..............................................................................................16
2.1 Sonderklem
me
n...................................................................................... 16
2.1.1 Allgemeine Beschreibung
..................................................................16
2.1.1.1 Sicherheitshinweise ......................................................................16
2.1.1.2 Aufbau einer Positioniersteuerung................................................ 17
2.1.1.2.1 Steuerungsteil...........................................................................17
2.1.1.2.2 Leistungsstufe ..........................................................................18
2.1.1.2.3 Antrieb...................................................................................... 18
2.1.1.2.4 Mechanik..................................................................................19
2.1.1.3 Positionierung ...............................................................................20
2.1.1.3.1 Absolute Positionierung........................................................... 20
2.1.1.3.2 Relative Positionierung ............................................................ 21
2.1.1.3.3 On the Fly Positionierung (Fliegender Sollwertwechsel)........22
2.1.1.3.4 Referenzieren ...........................................................................23
2.1.1.3.5 Joggen/Tippbetrieb...................................................................24
2.1.1.3.6 Rundachse ................................................................................ 24
2.1.1.3.7 Beschleunigungsarten .............................................................. 25
2.1.1.3.7.1 Konstante Beschleunigung .................................................. 25
2.1.1.3.7.2 Lineare
Beschleunigung ...................................................... 26
2.1.1.3.7.3 sin²*t
Beschleunigung ......................................................... 27
2.1.1.3.7.4 Einstellbare Beschleunigung ...............................................28
2.1.1.4 Current
Control ............................................................................. 30
2.1.1.5 Drehzahlsteuerung
........................................................................31
2.1.1.6 Nockenschaltwerk......................................................................... 32
2.1.1.7 Brake Control................................................................................33
2.1.1.8 Befehlstabellen..............................................................................34
3 750-672 [Steppercontroller] .....................................................................36
3.1 Ansicht.................................................................................................... 43
3.2 Anschlusselemente ................................................................................. 44
3.3 Anzeigeelemente .................................................................................... 45
3.4 Bedienelemente ...................................................................................... 46
3.5 Schematisches Schaltbild .......................................................................46

4 • Inhaltsverzeichnis
WAGO-I/O-SYSTEM 750
Busklemmen
3.6 Technische Daten ...................................................................................47
3.6.1 Derating .............................................................................................49
3.6.2 Stromvorgabe.....................................................................................49
3.6.2.1 Vorgabe
Motornennstrom.............................................................49
3.6.2.2 Stromprofilvorgabe....................................................................... 49
3.7 Prozessabbild..........................................................................................51
3.7.1 Übersicht............................................................................................ 51
3.7.2 Controlbyte, Statusbyte .....................................................................52
3.7.3 Zyklisches Prozessabbild...................................................................59
3.7.4 Prozessabbild Mailbox ......................................................................60
3.8 Mailboxbetrieb .......................................................................................61
3.9 Tabellenmanager ....................................................................................61
3.9.1 Download...........................................................................................63
3.9.2 Steuerung ...........................................................................................63
3.10 Konfiguration .........................................................................................64
3.10.1 Konfiguration über Controlbyte C2...................................................64
3.10.1.1 Frequenzvorteiler ..........................................................................65
3.10.1.2 Beschleunigungsfaktor..................................................................66
3.10.2 Konfiguration über Mailbox..............................................................67
3.10.2.1 Konfiguration der Basisparameter ................................................68
3.10.2.1.1 Applikationsanwahl..................................................................68
3.10.2.1.2 Vorteiler für maximale Geschwindigkeit.................................69
3.10.2.1.3 Faktor für maximale Beschleunigung ......................................69
3.10.2.1.4 Referenzierfahrt........................................................................69
3.10.2.1.5 JogMode................................................................................... 70
3.10.2.1.6 Rampen.....................................................................................70
3.10.2.1.7 Skalierungsfaktoren..................................................................71
3.10.2.1.8 Bremse......................................................................................72
3.10.2.1.9 Hardware/Software-Konfiguration...........................................72
3.10.2.1.10 Stromregler...............................................................................72
3.10.3 Digitale Signale und ihre Verknüpfung.............................................73
3.10.4 Verlinkung von Bits...........................................................................74
3.10.4.1
Besondere Bits ZERO, ONE, MZERO und MONE..................... 77
3.10.4.2 Anwender
Bits ..............................................................................78
3.10.4.3 Filter, Tiefpass, Timer und Zähler ................................................ 79
3.10.5 Fahrbefehle ........................................................................................84
3.10.6 Skalierung, Zahlenbereiche und Einheiten........................................85
3.10.6.1 Interne
Maßeinheiten ....................................................................85
3.10.6.1.1 Zeit
...........................................................................................85
3.10.6.1.2 Weg .......................................................................................... 86
3.10.6.1.3 Geschwindigkeit.......................................................................86
3.10.6.1.4 Drehzahl ...................................................................................86
3.10.6.1.4.1 Berechung über die interne Pulsfrequenz............................86
3.10.6.1.4.2 Direkte Berechung...............................................................87
3.10.6.1.5 Beschleunigung ........................................................................88
3.10.6.2 Externe Maßeinheiten ................................................................... 88
3.10.6.2.1 Weg .......................................................................................... 89
3.10.6.2.2 Geschwindigkeit.......................................................................89
3.10.6.2.3 Beschleunigung ........................................................................89

Inhaltsverzeichnis • 5
WAGO-I/O-SYSTEM 750
Busklemmen
3.11 Betriebsarten...........................................................................................89
3.11.1 Betrieb über zyklisches Prozessabbild ..............................................89
3.11.1.1 Anwahl einer Betriebsart ..............................................................90
3.11.1.2 Beenden einer Betriebsart.............................................................90
3.11.1.3 Zeitdiagramm Anwahl und Beenden einer Betriebsart................. 91
3.11.1.4 Betriebsart Einzelpositionierung...................................................92
3.11.1.4.1 Prozessabbild Einzelpositionierung ......................................... 93
3.11.1.4.2 Zeitdiagramm Einzelpositionierung......................................... 97
3.11.1.5 Betriebsart Referenzieren .............................................................98
3.11.1.5.1 Prozessabbild Referenzieren ....................................................99
3.11.1.5.2 Zeitdiagramm Referenzieren..................................................101
3.11.1.5.3 Startparameter für die Betriebsart Referenzieren................... 102
3.11.1.6 Betriebsart JogMode und Tippbetrieb ........................................106
3.11.1.6.1 Prozessabbild JogMode und Tippbetrieb............................... 106
3.11.1.6.2
Zeidiagramm
JogMode und Tippbetrieb................................ 110
3.11.1.7 Betriebsart Fahrprogramm..........................................................111
3.11.1.7.1 Prozessabbild Fahrprogramm................................................. 112
3.11.1.7.2 Zeitdiagramm Fahrprogramm ................................................ 115
3.11.1.7.3 Beispiel-Fahrprogramm ......................................................... 116
3.11.1.7.4 Autostart.................................................................................116
3.11.1.8 Betriebsart Rundachse ................................................................117
3.11.1.8.1 Relative Positionierung ..........................................................118
3.11.1.8.2 Absolute Positionierung......................................................... 118
3.11.1.9 Betriebsart Nockenwelle............................................................. 118
3.11.1.10 Betriebsart Positionstabelle.........................................................120
3.11.1.10.1 Einlernen von Positionen ....................................................... 120
3.11.1.11 Betriebsart Geschwindigkeitssteuerung......................................120
3.11.1.11.1 Prozessabbild Geschwindigkeitssteuerung ............................ 122
3.11.2 Fahrbetrieb über Mailbox ................................................................ 125
3.11.2.1 Fahrkommandos..........................................................................125
3.11.3 Fahrbereichsbegrenzung..................................................................125
3.11.3.1 Hardware-Endschalter.................................................................125
3.11.3.2 Software-Endschalter.................................................................. 126
3.11.4 Ansteuerung einer Motorbremse ..................................................... 127
3.12 Diagnose und Fehler.............................................................................129
3.12.1 Fehlerme
ldung und Auswertung .....................................................129
3.12.2 Fehler Quittierung............................................................................129
3.12.3
Parametrierung Klemmenbus Sammel-Diagnose............................130
3.12.4 Zeitdiagramm
zur Fehlerbehandlung............................................... 131
3.12.4.1 Fehlerursache wurde vor Quittierung behoben...........................131
3.12.4.2
Fehlerursache wurde vor Quittierung noch nicht behoben.........131
3.12.4.3 Flussdiagramm zur Fehlerbehandlung........................................132
3.12.5 Interne Zustandsvariablen................................................................133
3.12.6 Datenrekorder ..................................................................................133
3.13 Installationshinweise ............................................................................135
3.14 Anschlussbeispiel ................................................................................. 137
3.15 Empfehlungen zur Vermeidung einer Überspannung beim Abbremsen
oder Absenken einer vertikalen Last....................................................138
3.16 Hinweise zur Motorauswahl.................................................................138

6 • Inhaltsverzeichnis
WAGO-I/O-SYSTEM 750
Busklemmen
3.16.1 Nennstrom........................................................................................138
3.16.2 Bemessung der Motorinduktivität ...................................................139
3.17 Prozessprioritäten ................................................................................. 141
4 Anhang
.....................................................................................................143
4.1 Berechnungsformeln.............................................................................143
4.1.1 Position ............................................................................................143
4.1.1.1 Vollschritt-Winkel ......................................................................143
4.1.1.2 Rotorlage.....................................................................................144
4.1.1.3 Rundachse...................................................................................144
4.1.2 Drehzahl...........................................................................................144
4.1.2.1 Frequenz......................................................................................144
4.1.2.2 Frequenzvorteiler ........................................................................145
4.1.2.3 Berechung über die interne Pulsfrequenz ...................................145
4.1.2.4 Direkte Berechung ...................................................................... 146
4.1.3 Beschleunigung................................................................................146
4.1.4 Elektrische Parameter ......................................................................147
4.1.4.1 Motorkonstante ........................................................................... 147
4.1.4.2 Versorgungsspannung.................................................................148
4.1.4.3 Stromprofilvorgabe..................................................................... 149
4.1.4.4 Pufferkondensator .......................................................................149
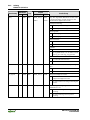
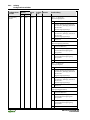
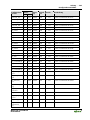
4.2 Mailboxbefehle.....................................................................................150
4.2.1 Übersicht der Mailboxbefehle .........................................................150
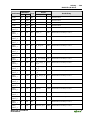
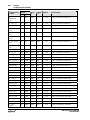
4.2.2 Übersicht der Mailboxbefehle nach Opcode sortiert.......................152
4.2.3 Übersicht der Mailboxbefehle nach Funktion sortiert.....................153
4.2.4 Befehlsreferenz Mailboxbefehle......................................................154
4.2.4.1 Allgemeine Befehle .................................................................... 154
4.2.4.1.1 IDLE (0x00) ...........................................................................154
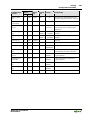
4.2.4.2 Fahrbefehle .................................................................................155
4.2.4.2.1 DRIVE_COMMAND (0x40).................................................155
4.2.4.3 Downloadbefehle ........................................................................156
4.2.4.3.1 DLD_START (0x41) .............................................................156
4.2.4.3.2 DLD_CONT (0x42) ...............................................................159
4.2.4.3.3 DLD_END (0x43)..................................................................162
4.2.4.4 Tabellenmanagementbefehle
......................................................164
4.2.4.4.1 TABLE_ERASE (0x44).........................................................164
4.2.4.4.2 TABLE_COPY
(0x45)...........................................................166
4.2.4.4.3 TABLE_START (0x46).........................................................169
4.2.4.4.4 TABLE_STOP
(0x48)............................................................170
4.2.4.4.5 TABLE_GET_ACTIVE
(0x4F).............................................171
4.2.4.5 Diagnosebefehle..........................................................................173
4.2.4.5.1 DIAG_RD_ERROR (0x49) ...................................................173
4.2.4.5.2 DIAG_QUIT_ERROR (0x4A) ..............................................174
4.2.4.5.3 DIAG_RD_VAR (0x4C)........................................................175
4.2.4.5.4 DIAG_RD_BIT (0x4D) .........................................................176
4.2.4.5.5 DIAG_QUERY_STORAGE
(0x4E)......................................177
4.2.4.6 Konfigurationstabellenbefehle
....................................................178
4.2.4.6.1 CONFIG_SET_PTR (0x50)...................................................178
4.2.4.6.2 CONFIG_WR (0x51).............................................................179

Inhaltsverzeichnis • 7
WAGO-I/O-SYSTEM 750
Busklemmen
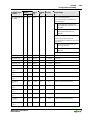
4.2.4.6.3 CONFIG_RD (0x52)..............................................................180
4.2.4.6.4 CONFIG_SAVE (0x53).........................................................181
4.2.4.6.5 CONFIG_RESTORE (0x54).................................................. 182
4.2.4.7 Positionstabellenbefehle .............................................................184
4.2.4.7.1 POS_TABLE_CREATE (0x5C)............................................ 184
4.2.4.7.2 POS_TABLE_SET_PTR (0x5D)........................................... 186
4.2.4.7.3 POS_TABLE_WR (0x5E) .....................................................187
4.2.4.7.4 POS_TABLE_TEACH (0x5F) .............................................. 188
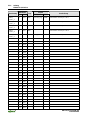
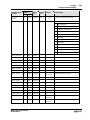
4.3 Kommandos für Fahrbetrieb ................................................................190
4.3.1 Übersicht Kommandos für Fahrbetrieb ...........................................190
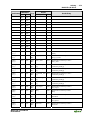
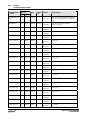
4.3.2 Übersicht Kommandos für Fahrbetrieb nach Opcode sortiert.........193
4.3.3 Übersicht Kommandos für Fahrbetrieb nach Funktion sortiert....... 196
4.3.4 Befehlsreferenz Kommandos für Fahrbetrieb .................................199
4.3.4.1 Sollwertbefehle ........................................................................... 199
4.3.4.1.1 MOVE (0x02) ........................................................................199
4.3.4.1.2 MOVE_IMMEDIATE (0x03)................................................200
4.3.4.1.3 MOVE_TABLE (0x04).......................................................... 201
4.3.4.1.4 MOVE_TABLE_IMMEDIATE (0x05).................................202
4.3.4.1.5 MOVE_REL (0x06)............................................................... 203
4.3.4.1.6 MOVE_TABLE_REL (0x08)................................................ 204
4.3.4.1.7 SPEED (0x10)........................................................................ 205
4.3.4.1.8 SPEED_IMMEDIATE (0x11) ............................................... 206
4.3.4.1.9 STOP_FAST (0x18)...............................................................207
4.3.4.1.10 STOP_NO_RAMP (0x19) ..................................................... 208
4.3.4.1.11 TORQ (0x1C).........................................................................209
4.3.4.1.12 TORQ_IMM (0x1D).............................................................. 210
4.3.4.1.13 START_REFERENCING (0x20)..........................................211
4.3.4.1.14 SET_ACC_MODE (0x21) .....................................................213
4.3.4.1.15 SET_ACC (0x22)................................................................... 215
4.3.4.1.16 SET_ACC_PARAM_UP (0x23)............................................ 216
4.3.4.1.17 SET_ACC_PARAM_DOWN (0x24) ....................................217
4.3.4.1.18 SET_VELOCITY (0x25) .......................................................218
4.3.4.1.19 SET_VELOCITY_TARGET (0x2B)..................................... 219
4.3.4.1.20 SET_ACTUALPOSITON
(0x2E).......................................... 220
4.3.4.1.21 SET_ACTUALPOSITION_ZERO
(0x2F) ............................ 221
4.3.4.1.22 SET_CURRENT (0x39) ........................................................ 222
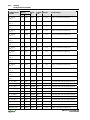
4.3.4.2 Arithm
etikbefehle
.......................................................................223
4.3.4.2.1 VAR_SET (0x50)...................................................................223
4.3.4.2.2 VAR_INC (0x51)................................................................... 224
4.3.4.2.3 VAR_DEC
(0x52)..................................................................225
4.3.4.2.4 VAR_ADD
(0x53) ................................................................. 226
4.3.4.2.5 VAR_SUB (0x54).................................................................. 227
4.3.4.2.6 VAR_MUL (0x55)................................................................. 228
4.3.4.2.7 VAR_COPY (0x56) ...............................................................229
4.3.4.2.8 VAR_DIV (0x57)...................................................................230
4.3.4.3 Wartebefehle............................................................................... 231
4.3.4.3.1 WAIT_TIME (0x70).............................................................. 231
4.3.4.3.2 WAIT_TEST_BIT (0x71)...................................................... 232
4.3.4.4 Hilfsbefehle.................................................................................233

8 • Inhaltsverzeichnis
WAGO-I/O-SYSTEM 750
Busklemmen
4.3.4.4.1 WR_BIT (0x78) ..................................................................... 233
4.3.4.4.2 NOP (0xF0)............................................................................ 234
4.3.4.4.3 PROG_STOP (0xF1)..............................................................235
4.3.4.4.4
PROG_END (0x00 oder 0xFF)..............................................236
4.3.4.4.5 GOTO (0xF5).........................................................................237
4.3.4.4.6 GOTO_IF (0xF6) ...................................................................238
4.3.4.4.7 GOTO_IF_NOT (0xF7) .........................................................239
4.3.4.4.8 GOTO_LABEL (0xF8) ..........................................................240
4.3.4.4.9 GOTO_LABEL_IF (0xF9) ....................................................241
4.3.4.4.10 GOTO_LABEL_IF_NOT (0xFA) .........................................242
4.3.4.4.11 LABEL (0xFB) ...................................................................... 243
4.4 Fehler-Blinkcodes ................................................................................ 244
4.4.1 Fehlercodes 1111 bis 1999 ..............................................................244
4.4.2 Fehlercodes 2111 bis 2999 ..............................................................244
4.4.3 Fehlercodes 3111 bis 3999 ..............................................................244
4.4.4
Wa
rncodes 5111 bis 5999................................................................245
4.4.5 Signalisierung ..................................................................................245
4.4.6 Parametrierung Klemmenbus Sammel-Diagnose...........................245
4.4.7 Übersicht der Fehler-Blinkcodes .....................................................246
4.5 Bitfeld für I/O-Driver ...........................................................................262
4.6 Konfigurationsvariablen.......................................................................283
4.7 Interne Zustandsvariablen .................................................................... 299

Wichtige Erläuterungen • 9
Sicherheitshinweise
WAGO-I/O-SYSTEM 750
Busklemmen
1 Wichtige Erläuterungen
Dieses Kapitel beinhaltet ausschließlich eine Zusammenfassung der
wichtigsten Sicherheitsbestimmungen und Hinweise. Diese werden in den
einzelnen Kapiteln wieder aufgenommen. Zum Schutz Ihrer Gesundheit und
zur Vorbeugung von Sachschäden an Geräten ist es notwendig, die
Sicherheitsrichtlinien sorgfältig zu lesen und einzuhalten.
1.1 Rechtliche Grundlagen
1.1.1 Urheberschutz
Dieses Handbuch, einschließlich aller darin befindlichen Abbildungen, ist
urheberrechtlich geschützt. Jede Weiterverwendung dieses Handbuches, die
von den urheberrechtlichen Bestimmungen abweicht, ist nicht gestattet. Die
Reproduktion, Übersetzung in andere Sprachen sowie die elektronische und
fototechnische Archivierung und Veränderung bedarf der schriftlichen
Genehmigung der WAGO Kontakttechnik GmbH & Co. KG, Minden.
Zuwiderhandlungen ziehen einen Schadenersatzanspruch nach sich.
Die WAGO Kontakttechnik GmbH & Co. KG behält sich Änderungen, die
dem technischen Fortschritt dienen, vor. Alle Rechte für den Fall der
Patenterteilung oder des Gebrauchmusterschutzes sind der WAGO
Kontakttechnik GmbH & Co. KG vorbehalten. Fremdprodukte werden stets
ohne Vermerk auf Patentrechte genannt. Die Existenz solcher Rechte ist daher
nicht auszuschließen.
1.1.2 Personalqualifikation
Der in diesem Handbuch beschriebene Produktgebrauch erfordert spezielle
Personenqualifikationen, die der folgenden Tabelle zu entnehmen sind:
Tätigkeit Elektrofachkraft
Unterwiesenes
Personal *)
Fachkräfte mit einer Ausbildung
in der SPS-Programmierung **)
Montage
X X
Inbetriebnahme
X X
Programmierung
X
Wartung
X X
Störbeseitigung
X
Demontage
X X
*) Unterwiesene Personen sind von Fachpersonal oder von einer Elektrofachkraft geschult.
**) Als Fachkraft gilt, wer aufgrund seiner fachlichen Ausbildung, Kenntnisse und
Erfahrungen im genannten Tätigkeitsbereich hat und die ihm übertragenen Arbeiten nach
einschlägigen Bestimmungen beurteilen sowie mögliche Gefahren erkennen kann.

10 • Wichtige Erläuterungen
Rechtliche Grundlagen
WAGO-I/O-SYSTEM 750
Busklemmen
Alle Personen sind mit den geltenden Normen vertraut. Für Fehlhandlungen
und Schäden, die an WAGO-Produkten und Fremdprodukten durch
Missachtung der Informationen dieses Handbuches entstehen, übernimmt die
WAGO Kontakttechnik GmbH & Co. KG keine Haftung.
1.1.3 Bestimmungsgemäße Verwendung der Serie 750
Feldbuskoppler/-controller und I/O-Module des modularen I/O-Systems 750
dienen dazu, digitale und analoge Signale von Sensoren aufzunehmen und an
Aktoren auszugeben oder an übergeordnete Steuerungen weiterzuleiten. Mit
den programmierbaren Feldbuscontrollern ist zudem eine (Vor-)Verarbeitung
möglich.
Die Komponenten sind für ein Arbeitsumfeld entwickelt, welches der
Schutzklasse IP20 genügt. Es besteht Fingerschutz und Schutz gegen feste
Fremdkörper bis 12,5 mm, jedoch kein Schutz gegen Wasser. Der Betrieb der
Komponenten in nasser und staubiger Umgebung ist nicht gestattet, sofern
nicht anders angegeben.
1.1.4 Technischer Zustand der Geräte
Die Komponenten werden ab Werk für den jeweiligen Anwendungsfall mit
einer festen Hard- und Software-Konfiguration ausgeliefert. Änderungen an
Hard-, Soft- und Firmware sind ausschließlich im Rahmen der in den
Handbüchern dokumentierten Möglichkeiten zulässig. Alle Veränderungen an
der Hard- oder Software sowie der nicht bestimmungsgemäße Gebrauch der
Komponenten bewirken den Haftungsausschluss der WAGO Kontakttechnik
GmbH & Co. KG.
Wünsche an eine abgewandelte bzw. neue Hard- oder Software-Konfiguration
richten Sie bitte an die WAGO Kontakttechnik GmbH & Co. KG.

Wichtige Erläuterungen • 11
Sicherheitshinweise
WAGO-I/O-SYSTEM 750
Busklemmen
1.2 Normen und Richtlinien zum Betrieb der Serie 750
Beachten Sie die für Ihre Anlage zutreffenden Normen und Richtlinien:
Die Daten- und Versorgungsleitungen müssen normgerecht angeschlossen
und verlegt werden, damit keine Störungen an Ihrer Anlage sowie
Gefahren für das Personal auftreten.
Beachten Sie bei der Montage, Inbetriebnahme, Wartung und
Störbehebung die für Ihre Maschine zutreffenden
Unfallverhütungsvorschriften wie beispielsweise die BGV A 3,
„Elektrische Anlagen und Betriebsmittel“.
Not-Aus-Funktionen und -Einrichtungen dürfen nicht unwirksam gemacht
werden. Siehe dazu einschlägigen Normen, z. B. die DIN EN 418.
Ihre Anlage muss nach EMV-Richtlinien ausgerüstet sein, um elektro-
magnetische Störungen abzuleiten.
Der Betrieb von Komponenten der Serie 750 im Wohnbereich ist ohne
weitere Maßnahmen nur zulässig, wenn diese die Emissionsgrenzen
(Störaussendungen) gemäß EN 61000-6-3 einhalten. Entsprechende
Angaben entnehmen Sie dem Kapitel „Das WAGO-I/O-SYSTEM 750“
„Systembeschreibung“ „Technische Daten“.
Beachten Sie die Sicherheitsmaßnahmen gegen elektrostatische Entladung
gemäß DIN EN 61340-5-1/-3. Beim Umgang mit den Komponenten ist auf
gute Erdung der Umgebung (Personen, Arbeitsplatz und Verpackung) zu
achten.
Die jeweils gültigen und anwendbaren Normen und Richtlinien zum
Aufbau von Schaltschränken sind zu beachten.

12 • Wichtige Erläuterungen
Symbole
WAGO-I/O-SYSTEM 750
Busklemmen
1.3 Symbole
Gefahr
Informationen unbedingt beachten, um Personen vor Schaden zu bewahren.
Achtung
Informationen unbedingt beachten, um Geräteschäden zu verhindern.
Beachten
Randbedingungen, die für einen fehlerfreien, effektiven Betrieb unbedingt zu
beachten sind.
ESD (Electrostatic Discharge)
Warnung vor Gefährdung der Komponenten durch elektrostatische
Entladung. Vorsichtsmaßnahme bei Handhabung elektrostatisch
entladungsgefährdeter Bauelemente beachten.
Hinweis
Gibt wichtige Hinweise, die einzuhalten sind, um einen störungsfreien
effektiven Geräteeinsatz zu gewährleisten.
Weitere Informationen
Verweise auf zusätzliche Informationen aus Literatur, Handbüchern,
Datenblättern und dem Internet.

Wichtige Erläuterungen • 13
Sicherheitshinweise
WAGO-I/O-SYSTEM 750
Busklemmen
1.4 Sicherheitshinweise
Beim Einbindung des Gerätes in Ihre Anlage und während des Betriebes sind
folgende Sicherheitshinweise zu beachten:
Gefahr
Das WAGO-I/O-SYSTEM 750 mit seinen Komponenten ist ein offenes
Betriebsmittel. Es darf ausschließlich in Gehäusen, Schränken oder in
elektrischen Betriebsräumen aufgebaut werden. Der Zugang ist lediglich über
Schlüssel oder Werkzeug von autorisiertem Fachpersonal zu ermöglichen.
Gefahr
Schalten Sie immer alle verwendeten Spannungsversorgungen für das Gerät
ab, bevor Sie es montieren, Störungen beheben oder Wartungsarbeiten
vornehmen.
Achtung
Tauschen Sie defekte oder beschädigte Geräte/Module (z. B. bei deformierten
Kontakten) aus, da die Funktion der betroffenen Feldbusstation langfristig
nicht sichergestellt ist.
Achtung
Die Komponenten sind unbeständig gegen Stoffe, die kriechende und
isolierende Eigenschaften besitzen, z. B. Aerosole, Silikone, Triglyceride
(Bestandteil einiger Handcremes). Kann nicht ausgeschlossen werden, dass
diese Stoffe im Umfeld der Komponenten auftreten, ist die Komponente in
ein Gehäuse einzubauen, das resistent gegen oben genannte Stoffe ist.
Generell sind zur Handhabung der Geräte/Module saubere Werkzeuge und
Materialien zu verwenden.
Achtung
Verschmutzte Kontakte sind mit ölfreier Druckluft oder mit Spiritus und
einem Ledertuch zu reinigen.
Achtung
Verwenden Sie kein Kontaktspray, da im Extremfall die Funktion der
Kontaktstelle beeinträchtigt werden kann.
Achtung
Vermeiden Sie die Verpolung der Daten- und Versorgungsleitungen, da dies
zu Schäden an den Geräten führt.
ESD
In den Geräten sind elektronische Komponenten integriert, die durch
elektrostatische Entladung bei Berührung zerstört werden können.

14 • Wichtige Erläuterungen
Schriftkonventionen
WAGO-I/O-SYSTEM 750
Busklemmen
Achtung
Für Komponenten mit Ethernet-/RJ-45-Anschluss:
Nur für Verwendung in LANs, nicht für Verbindung zu
Telekommunikationsnetzen
1.5 Schriftkonventionen
Kursiv
Namen von Pfaden und Dateien sind als kursive Begriffe
gekennzeichnet.
z. B.: C:\Programme\WAGO-IO-CHECK
Kursiv
Menüpunkte werden als Begriffe kursiv fett gekennzeichnet.
z. B.: Speichern
\
Ein Backslash zwischen zwei Namen bedeutet die Auswahl
eines Menüpunktes aus einem Menü.
z. B.: Datei \ Neu
ENDE
Schaltflächen sind mit Kapitälchen fett dargestellt
z. B.: EINGABE
< >
Tasten-Beschriftungen sind in spitzen Klammern eingefasst und
fett dargestellt
z. B.: <F5>
Courier
Programmcodes werden in der Schriftart Courier gedruckt.
z. B.: END_VAR
1.6 Darstellungen der Zahlensysteme
Zahlensystem Beispiel Bemerkung
Dezimal 100 normale Schreibweise
Hexadezimal 0x64 C-Notation
Binär '100'
'0110.0100'
in Hochkomma,
Nibble durch Punkt getrennt
1.7 Gültigkeitsbereich
Dieses Handbuch beschreibt die Sonderklemme 750-672 Steppercontroller aus
dem WAGO-I/O-SYSTEM 750.

Wichtige Erläuterungen • 15
Sicherheitshinweise
WAGO-I/O-SYSTEM 750
Busklemmen
Handhabung, Montage und Inbetriebnahme sind in dem Handbuch zum
Feldbus-Koppler/ -Controller beschrieben. Daher ist diese Dokumentation nur
im Zusammenhang mit dem entsprechenden Handbuch gültig.

16 • Busklemmen
Sicherheitshinweise
WAGO-I/O-SYSTEM 750
Busklemmen
2 Busklemmen
2.1 Sonderklemmen
2.1.1 Allgemeine Beschreibung
2.1.1.1 Sicherheitshinweise
Beachten Sie bitte folgende Hinweise um Schäden an Personen und
Gegenständen zu vermeiden.
Gefahr
Verhindern Sie den Zutritt von Personen zu Anlagenteilen mit sich
bewegenden Teilen durch geeignete bauliche Maßnahmen wie z. B.
Abschrankungen, Schutzgitter oder Gehäuse!
Gefahr
Installieren Sie ein NOT-AUS-Konzept entsprechend den örtlich gültigen
Vorschriften und den geltenden Regeln der Technik!
Achtung
Installieren Sie zur Begrenzung der Fahrbereiche geeignete Hardware-
Endschalter, die direkt die Leistungsansteuerung abschalten!
Achtung
Installieren Sie geeignete Einrichtungen zum Schutz von Motoren und
Leistungselektronik wie z. B. Motorschutzschalter oder Sicherungen!

Busklemmen • 17
Aufbau einer Positioniersteuerung
WAGO-I/O-SYSTEM 750
Busklemmen
2.1.1.2 Aufbau einer Positioniersteuerung
Die nachfolgende Abbildung zeigt den Aufbau einer typischen
Positioniersteuerung mit den im wesentlichen Elementen:
Steuerungsteil,
Leistungsteil,
Antrieb,
Mechanik.
M
Netz
Leistungsteil
MechanikAntrieb
Steuerung
Not-Aus
Sicherheits-
einrichtung
Leistungsstufe
Steppermodul
750-67x
Software-
Endschalter
Hardware-
Endschalter
Koppler/Controller
750-xxx
SPS
Abb. 2.1.1-1: Aufbau einer Positioniersteuerung g067x00d
2.1.1.2.1 Steuerungsteil
Der Steuerungsteil besteht aus der SPS für die Ablaufsteuerung und dem
Steppermodul 750-67x für die Positionier- bzw. FM- und PWM-Funktionen.

18 • Busklemmen
Aufbau einer Positioniersteuerung
WAGO-I/O-SYSTEM 750
Busklemmen
2.1.1.2.2 Leistungsstufe
Die Leistungsendstufe erzeugt aus den Pulsen des Moduls die für den
jeweiligen Motor notwendigen Antriebsströme. Beim Einsatz des
Steppermoduls 750-670 kann jede beliebige Endstufe eingesetzt werden, die
über eine Puls-Richtungs- oder Inkrementalgeberschnittstelle verfügt. Somit
können auch Endstufen für 3- oder 5-polige Steppermotoren oder DC- und
AC-Servomotoren zum Einsatz kommen. Die Steppermodule 750-671, -672,
und -673 haben eine integrierte Endstufe zur Ansteuerungen von 2-Phasen
Steppermotoren.
2.1.1.2.3 Antrieb
Steppermotoren sind einfache und wirtschaftliche Antriebe für hochgenaue
Positionieraufgaben für die unterschiedlichsten Anwendungen.
Die Welle eines Schrittmotors dreht sich bei jedem Impuls um einen defi-
nierten Winkel, bei schnellen Impulsfolgen geht diese Schrittbewegung in eine
stetige Drehbewegung über. Insbesondere durch Microstepping mit hoher
Auflösung wie bei den WAGO Modulen 750-671, -672 und -673 mit 64
fachem Microstepping wird durch hohe Laufruhe die Eigenresonanz der
Steppermotoren stark unterdrückt.
Die Bilder unten zeigen die möglichen Anschlussarten von Steppermotoren:
4-Draht-Motor Bipolar
6-Draht-Motor Bipolar
in Serie betrieben
8-Draht-Motor Bipolar
in Serie betrieben
8-Draht-Motor Bipolar
parallel betrieben
Abb. 2.1.1-2: Anschlussarten von Steppermotoren g067x02d

Busklemmen • 19
Aufbau einer Positioniersteuerung
WAGO-I/O-SYSTEM 750
Busklemmen
Bei der Motorauswahl ist, außer der Anschlussart und Phasenanzahl, auf den
benötigten Drehmomentverlauf über die Drehzahl, den dazu erforderlichen
Motorstrom, und auf den Wicklungswiderstand bzw. die Motorinduktivität zu
achten.
Drehmomentverlauf und Drehzahl ergeben sich aus der zu realisierenden
Anwendung. Eine Drehmomentreserve von ca. 25 %, je nach Eigenschaften
der Mechanik, hat sich in der Praxis bewährt. Sie sollte berücksichtigt werden
um dynamische Effekte (Resonanzen in der Mechanik) abzudecken.
Weiterhin bestimmt der Ablauf der Positioniervorgänge die in den Motor
eingespeiste mittlere bzw. Spitzenleistung. Hier ist auf die
Gesamtverlustleistung und Temperatur des Motors zu achten.
Je nach Motortyp und -ausführung folgt daraus dann ein entsprechender
Strom, der von der Endstufe in den Motor eingeprägt werden muß. Die dazu
erforderliche Spannung hängt von dem Wicklungswiderstand, der
Motorinduktivität, und der Drehzahl (Gegen-EMK) ab. Daher kann es
erforderlich sein, das insbesondere bei hohen Drehzahlen, weit höhere Span-
nungen für den jeweiligenden Strom zur Verfügung gestellt werden müssen,
als es den Motorangaben entspricht. Die Motorangaben der Hersteller
beziehen sich auf den Motorstillstand (ohmscher Wicklungswiderstand). Da
die Leistungsendstufen der Steppermodule 750-671, -672, -673 eine
Stromregelung haben, können z.B. 12 V Motoren ohne Probleme an 24 V
Spannungen betrieben werden, solange Strom und Verlustleistung bzw.
Temperatur des Motors innerhalb der zulässigen Grenzen bleiben. Im
Zweifelsfall sollte beim Motorhersteller eine Bestätigung eingeholt werden.
2.1.1.2.4 Mechanik
Aus den Anforderungen der zu bewegenden Last, der ggf. zusätzlichen Lager,
Getriebe, Umlenkungen, Dämpfungselemente, etc., lassen sich die
erforderlichen Motordaten errechnen. Wichtige Parameter sind dabei:
Massenträgheit, Anlaufmoment, Haltemoment, Drehmoment bei der maximal
benötigten Drehzahl, Taktzeiten der Positionierung, notwendige
Beschleunigung und ggf. das benötigte Drehmoment beim Durchlaufen der
mechanischen Resonanz, insbesondere wenn mechanische Speicher wie lange
Antriebsbänder, Federelemente oder Schwingungspuffer (Kupplungen)
verwendet werden. Überschreitet das benötigte mechanische Drehmoment
nicht das vom Motor abgegebene Moment (unter Beachtung der
Eigenträgheit!), dann darf es zu keinem Schrittverlust kommen!

20 • Busklemmen
Positionierung
WAGO-I/O-SYSTEM 750
Busklemmen
2.1.1.3 Positionierung
Bei der Positionierung wird unterschieden zwischen absoluter und relativer
Positionierung. Ferner wird eine Referenzfahrt sowie ein Jog-Betrieb
unterschieden.
2.1.1.3.1 Absolute Positionierung
Positionieren von der absoluten Position X zur absoluten Position Y.
0
X
Y
Zeit
Geschwindigkeit
Weg
Abb. 2.1.1-3: Absolute Positionierung g067x03d
Einsatzmöglichkeiten z. B.:
Stellachsen
Verfahrwagen
Pick & Place
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
Seite wird geladen ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
















































































































































































































































































































WAGO Stepper Controller 70 V / 7.5 A 6IN, 2OUT Benutzerhandbuch
- Typ
- Benutzerhandbuch
Verwandte Artikel
-
WAGO 2-channel, 125VAC , 0.5A AC, 30VDC, 1A DC Benutzerhandbuch
-
WAGO 2-channel, resistance sensors Benutzerhandbuch
-
-
-
-
-
-
WAGO Incremental encoder interface Benutzerhandbuch
-
-
